회사 소개
About Us
설립배경
- 자율주행차 시장은 차량 센서 중심의 자체 기능 고도화와 정해진 규칙 준수 위주로 개발되었으나, 완전자율주행차는 인지의 성능 및 범위의 한계 극복을 위해 클라우드/엣지, 인공지능 S/W, 초저지연 통신과 보안 등 ICT 융합 개발로 발전하고 있습니다.
- 특히 자율주행 인지 판단 S/W는 국가ㆍ지역별 공통으로 적용될 수 있는 기술과 상이한 특성을 반영해야 하는 기술을 구분하여 체계적인 기반 R&D 추진이 필요하며, 서비스 목적형 기술 검증으로 신뢰성 및 수용성 확보가 관건입니다.
- 기술집약적 모빌리티 서비스 창출을 위한 핵심기술이나, 대부분 외산 솔루션을 도입하여 구축하고 있는 실정으로 기술 종속을 피하고 국산화를 통한 플랫폼 기반 기술 확보가 필요합니다.
설립목적
- ETRI 출자기술인 자율주행 인지ㆍ판단ㆍ제어 기술은 중소기업이 개발하기에는 고위험 R&D 기술로, ETRI 출자기술을 기반으로 핵심원천기술의 국산화 개발 및 기술 사업화 성공률을 극대화할 수 있을 것으로 기대됩니다.
- 연구소기업은 소위 ‘중소기업 디스카운트’ 현상을 극복할 수 있을 것으로 판단되며, 연구소기업이라는 신뢰감 있는 브랜드가 주는 유무형의 효과를 통해 기업 성장의 기반이 될 수 있습니다.
- 자율주행차 시장의 성장 속도는 급속하게 진행되고 있습니다. 무브투는 ETRI와 협업하여 고신뢰성, 원가 경쟁력, 안정적인 사업성을 확보하여 자율주행차 시장을 선도할 수 있는 기업으로 성장할 것입니다.
사업 개요
Business Overview
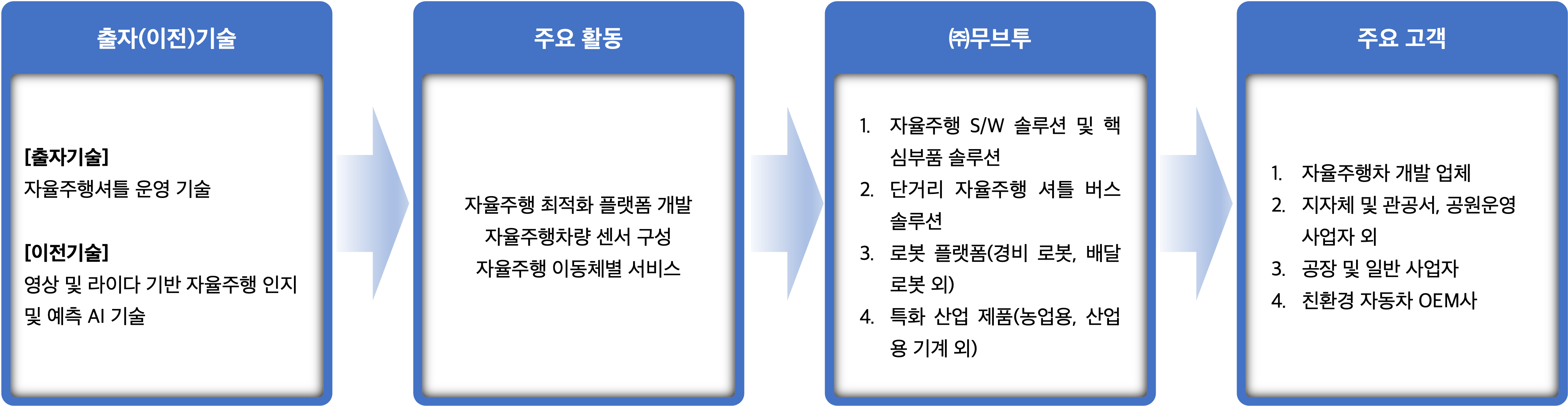
사업모델
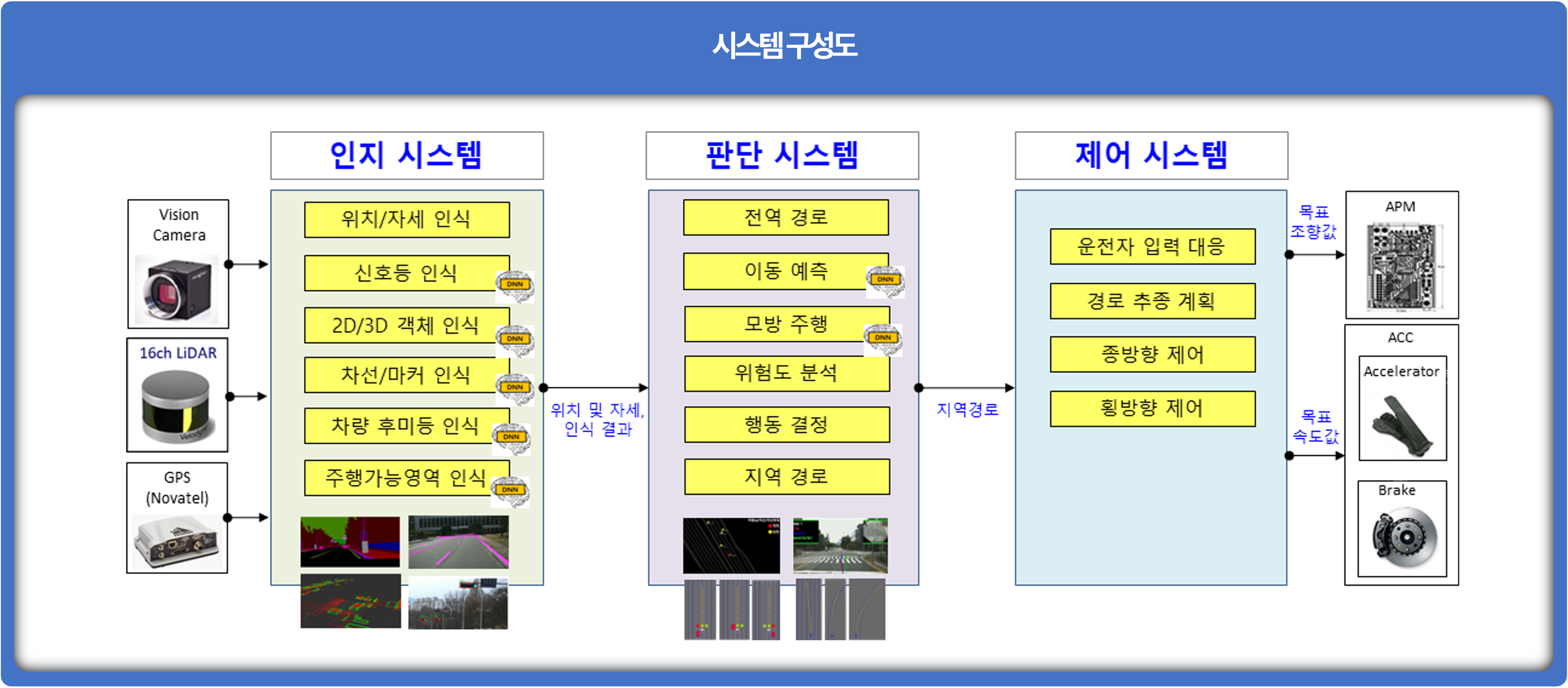
시스템구성도
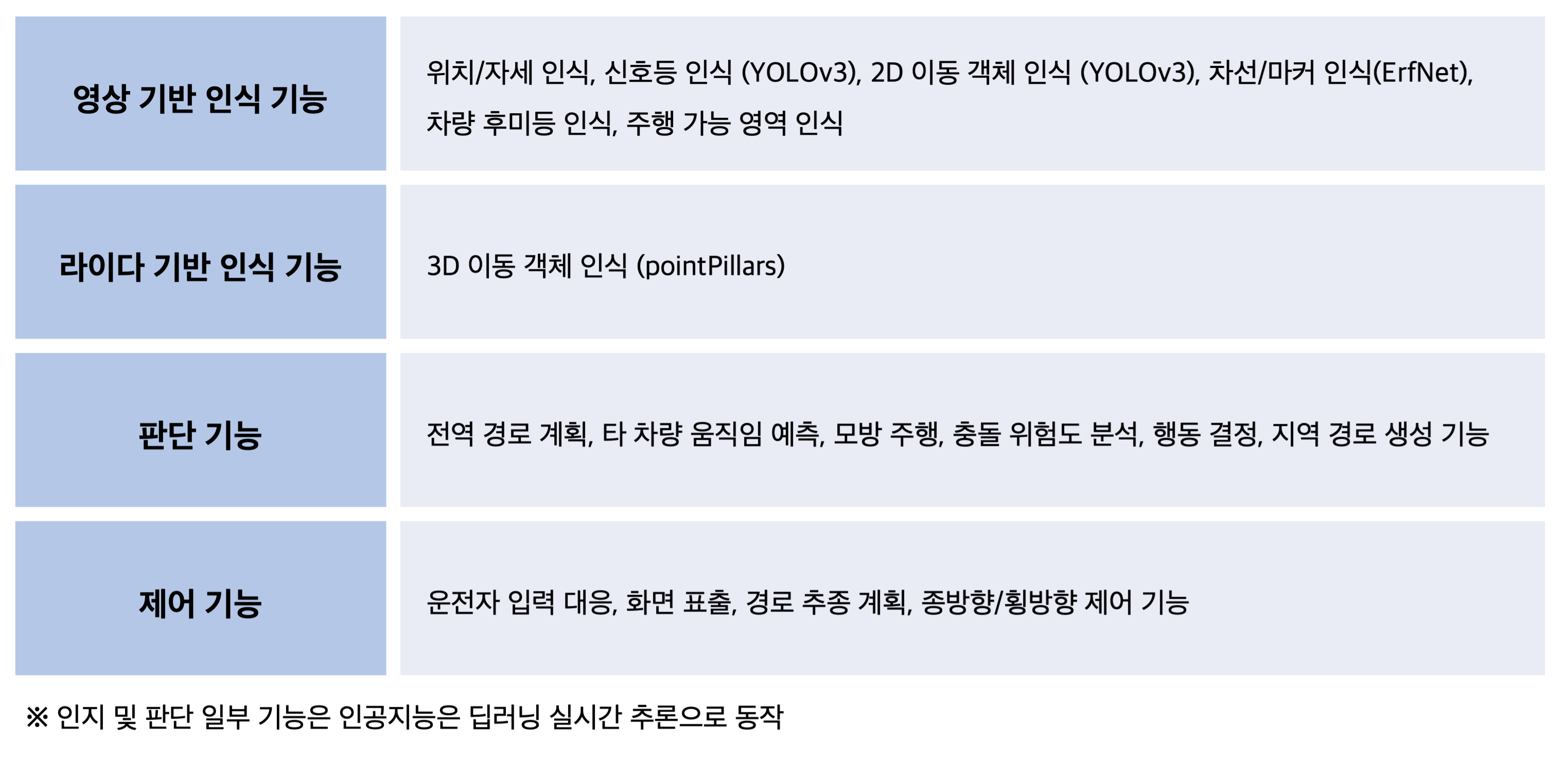
주요 알고리즘
사업화 전략
Products and Business
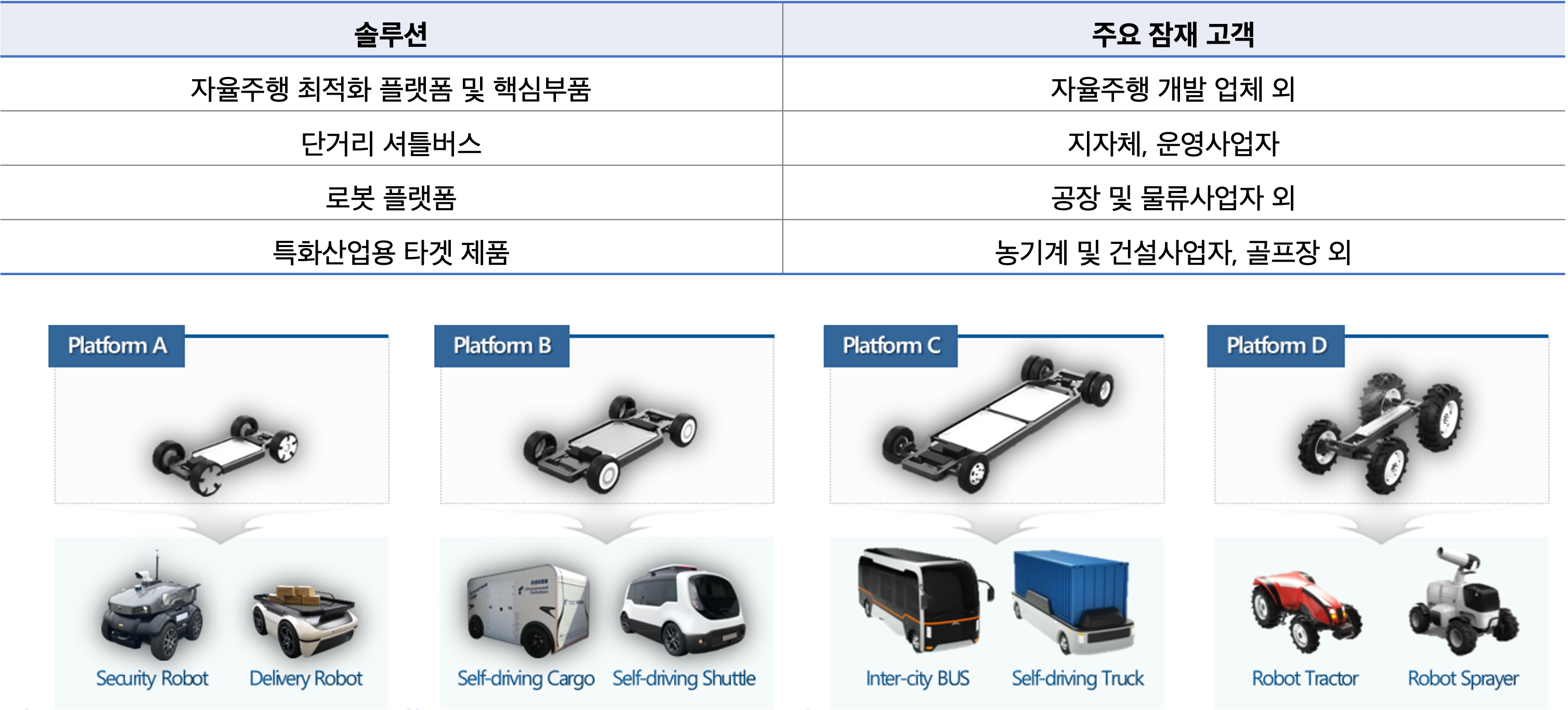
목표 제품
제품 및 시나리오 다양화에 의한 솔루션 출시

솔루션
고객 맞춤형 솔루션의 제공
시장 경쟁력
Market Competitiveness
기술의 첨단성
무브투의 시스템은 완전 자율주행 서비스 구현을 위해 교통 환경과 서비스 요구 맞춤형으로 실제 차량 3종(아이오닉, 제네시스, 위더스) 테스트를 통해 시범 서비스를 운영하고 있는 고도의 정확도와 신뢰성을 확보한 시스템입니다.
오류 내포 DGPS 의존성 탈피
자율주행차 구현에서 가장 노력이 소요되는 위치 인식 기능을 위해 사용하는 통신 기반의 GPS는 손쉬운 활용이 가능하지만 오류가 내포된
기법이라 할 수 있습니다.
무브투의 시스템은 통신 방식의 GPS 센서 의존성을 탈피한 비젼 기반의 위치 인지 알고리즘을 구현하고 장기간의 알고리즘 성능 고도화 및 테스트 데이터를 보유하고
있습니다.
센서 및 인공지능, V2X 통신 확장성을 위한 플랫폼
센서 재구성을 용이하게 하기 위해 이종 다수의 센서 간 캘리브레이션 S/W 구현과 기본적인 인공지능 융합의 인지 판단 기능을 구현한 후,
실제 차량에 탑재하여 확장성을 테스트 완료한 플랫폼입니다.
공개 플랫폼은 접근이 용이한 대신 확장성이 불가능한 단점이 있으나, 무브투의 시스템은 확장성 테스트를 완료한 시스템입니다.
인공지능 학습데이터 수집 및 활용 기반 자율주행 기능 고도화
주행 환경 데이터 수집 차량 2대를 이용하여 국내 도로 환경 10만Km와 학습용 데이터를 개인정보 비식별화 후 7종의 학습 데이터셋을 가공하고 국가 공공 데이터 포털에 공개하고 있습니다.
제품 소개
Products
-
와이드 디스플레이 모듈
SDS-43
-
자율주행용 서라운드 뷰 시스템
FHDCMM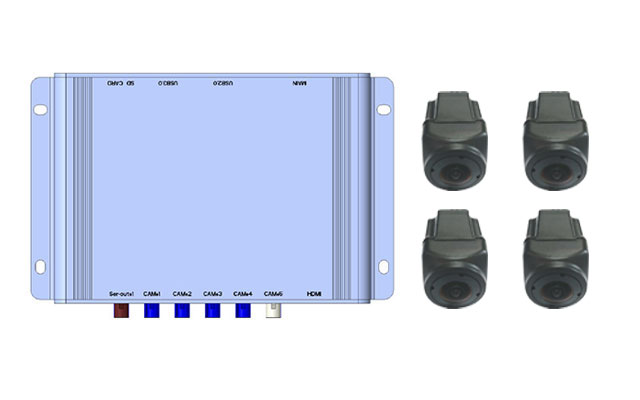
-
77GHz 차량용 4D 레이더
ALRR300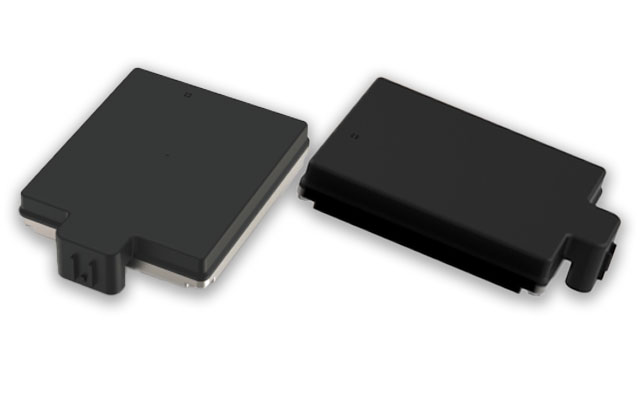
-
자율주행 전용 ADAS 카메라
MCAM-ADAS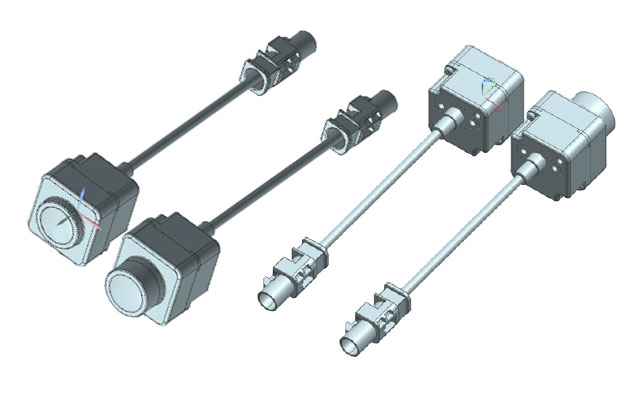
찾아오시는 길
Contact Us
주식회사 무브투 | 대전광역시 유성구 테크노4로 17 대덕비즈센터 A동 220호
