주변 물체의 거리와 위치를 측정하는 라이다 센서
레이저 신호를 이용해 차량 주변 전방위에 있는 물체와의 거리와 위치를 측정하는 센서 장치입니다. 차량 주변의 장애물과 공간 정보를 정밀하게 감지합니다.

버스소개
대전시 자율주행버스의 기본 사양과 주요 장치들을 소개합니다.

자율주행을 가능하게 하는 주요 장치와 각 장치별 역할을 소개합니다.
레이저 신호를 이용해 차량 주변 전방위에 있는 물체와의 거리와 위치를 측정하는 센서 장치입니다. 차량 주변의 장애물과 공간 정보를 정밀하게 감지합니다.
전방 영상을 촬영하여 차선, 차량, 보행자, 신호등 등의 시각 정보를 인식하는 센서 장치입니다. 주행 환경을 판단하는 데 필요한 영상 데이터를 제공합니다.

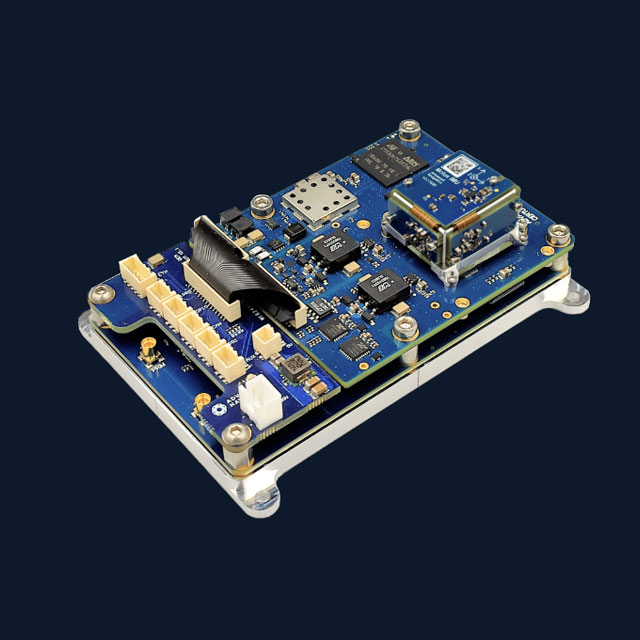
위성 신호를 이용해 차량의 현재 위치와 이동 경로를 계산하는 위치 측정 장치입니다. 지도 기반 주행과 경로 추적에 활용됩니다.
라이다, 카메라 등 센서 데이터를 분석하여 주변 환경과 객체를 인식하는 처리 장치입니다. 주행에 필요한 환경 정보를 생성합니다.
인지된 환경 정보를 기반으로 주행 경로와 차량 동작을 결정하는 연산 장치입니다. 가속, 감속, 정지, 회피 등의 주행 전략을 수립합니다.

판단 결과에 따라 조향, 가속, 제동 등 차량 구동을 제어하는 실행 장치입니다. 차량을 실제로 움직이도록 신호를 전달합니다.

센서 상태와 시스템 동작 정보를 표시하고, 자동/수동 주행 모드를 전환할 수 있는 인터페이스 장치입니다. 운전자가 차량 상태를 모니터링할 수 있도록 지원합니다.

차량 주변 상황과 정류장, 주행 정보를 시각적으로 제공하는 안내 장치입니다. 승객이 현재 주행 상태를 쉽게 확인할 수 있도록 돕습니다.

자율주행버스에 탑재된 각 장치의 주요 사양과 특징을 설명합니다.